Unsupervised Feature Learning via Non-Parametric Instance Discrimination
论文地址:https://arxiv.org/pdf/1805.01978
代码地址:https://github.com/zhirongw/lemniscate.pytorch
引言
实例判别(Instance Discrimination) 是2018年提出的一种无监督特征学习方法,它将对比学习的思想推向极致:将每个图像实例视为一个独立的类别,通过区分不同实例来学习特征表示。这篇论文是MoCo、SimCLR等现代对比学习方法的重要先驱工作。
论文的核心洞察来自对监督学习的观察:在ImageNet上训练的神经网络,即使没有显式指导,也能自动发现视觉上相似的类别(如leopard和jaguar)之间的关联。作者将这一观察延伸到实例级别:如果能够区分每个实例,那么学习到的特征应该能够捕获实例间的视觉相似性。
实例判别的核心创新
将无监督问题转化为监督问题:
实例判别的天才之处在于一个简单的转换:
- 传统无监督学习:没有标签,难以定义学习目标
- 实例判别:每个图像就是自己的标签,变成N分类问题
- 好处:可以直接使用成熟的分类框架和技术
为什么这种方法有效?
视觉相似性的自然涌现
- 虽然每个实例是独立类别,但视觉相似的实例会在特征空间聚集
- 原因:它们共享底层视觉模式(边缘、纹理、形状等)
- 结果:学到的特征捕获了语义信息
信息论的解释
- 区分N个实例需要log(N)比特信息
- 模型被迫学习最有效的编码
- 这种编码自然对应于语义特征
避免平凡解
- 不能简单记住每个实例(泛化要求)
- 必须学习可迁移的特征
- 数据增强强制学习不变性
技术挑战与解决方案
挑战1:计算Softmax的分母
当有百万级实例时,计算softmax分母需要遍历所有实例,计算成本巨大。
解决方案:NCE近似
1 | 原始softmax概率:P(i|v) = exp(v·f_i) / Σ_j exp(v·f_j) |
挑战2:存储所有实例的特征
需要存储所有训练图像的特征表示,内存需求大。
解决方案:Memory Bank
- 使用动量更新:新特征 = m×旧特征 + (1-m)×当前特征
- 好处:平滑特征变化,提高训练稳定性
- 内存需求:128维×100万实例 ≈ 500MB(可接受)
挑战3:负样本采样
从百万实例中采样负样本,如何保证采样质量?
解决方案:Proximal Regularization
- 不是随机采样,而是基于特征相似度
- 优先采样相似但不同的实例(困难负样本)
- 提高学习效率
核心思想
基本动机
关键观察:
- 监督学习中,模型会自动学习到视觉相似类别之间的关联
- 这种相似性不是来自语义标注,而是来自视觉数据本身
- 如果将类别级别的监督推向实例级别,能否学到更好的表示?
核心假设:
- 每个图像实例本身就是一个独特的"类别"
- 通过区分不同实例,模型会学习到捕获视觉相似性的特征
- 视觉相似的实例在特征空间中应该更接近
方法概述
将无监督学习问题转化为实例级别的分类问题:
- 每个训练图像是一个独立的类别
- 使用非参数softmax进行分类
- 使用NCE(Noise-Contrastive Estimation)解决计算问题
方法详解
非参数Softmax分类器
参数化Softmax的问题
传统的参数化softmax:
其中是类别的权重向量。
问题:
- 权重向量只对训练类别有效,无法泛化到新实例
- 权重向量作为类别原型,阻止了实例间的直接比较
- 需要存储和更新大量权重参数
非参数Softmax
将权重向量替换为特征向量:
其中:
- 是归一化后的特征向量()
- 是温度参数,控制分布的尖锐程度
优势:
- 直接比较实例:特征向量直接作为"类别原型"
- 泛化能力强:学习到的特征可以应用到任何新实例
- 计算高效:无需存储和更新权重参数
- 训练测试一致:训练和测试都使用相同的度量空间
Memory Bank机制
问题:计算需要所有实例的特征,但每次迭代只更新当前batch的特征。
解决方案:维护一个Memory Bank存储所有实例的特征。
更新策略:
- 初始化:Memory Bank中的特征初始化为随机单位向量
- 更新:每次迭代后,将当前batch的特征更新到Memory Bank
- 使用:计算损失时,从Memory Bank中读取特征
优势:
- 避免每次重新计算所有特征
- 保持特征的历史信息
- 计算效率高
Noise-Contrastive Estimation (NCE)
问题:当实例数量很大(如ImageNet的1.2M)时,计算完整的softmax不可行。
解决方案:使用NCE将多类分类问题转化为二分类问题。
NCE原理
将问题转化为:区分数据样本和噪声样本。
定义:
- 数据分布:,其中
- 噪声分布:(均匀分布)
- 噪声样本频率:倍于数据样本
后验概率:
仍然昂贵,使用蒙特卡洛估计:$$ Z_i \approx \frac{n}{m} \sum_{k=1}^{m} \exp\big(v_{j_k}^\top v / \tau\big) $$
其中是随机采样的索引。
复杂度:从降低到每个样本。
Proximal Regularization(近端正则化)
问题:每个"类别"只有一个实例,每个epoch每个类别只访问一次,训练过程振荡严重。
解决方案:引入近端正则化项,鼓励训练过程的平滑性。
正则化项:
$$ \lambda \big\lVert v_i^{(t)} - v_i^{(t-1)} \big\rVert_2^2 $$
其中:
- 是当前迭代的特征
- 是Memory Bank中存储的特征(上一迭代)
完整损失:
$$ \mathcal{L}_{\text{NCE}}(\theta) = -\mathbb{E}_{(i,v)\sim P_d}\Big[\log h\big(i, v_i^{(t-1)}\big) - \lambda \big\lVert v_i^{(t)} - v_i^{(t-1)} \big\rVert_2^2\Big] - m \cdot \mathbb{E}_{(i,v')\sim P_n}\Big[\log\big(1 - h(i, v'^{(t-1)})\big)\Big] $$
加权k-NN分类器
测试时分类:
- 计算特征:
- 相似度计算:
- k-NN检索:找到top-k最近邻
- 加权投票:类别的权重为
w_c = \sum_{i \in N_k} \alpha_i \cdot \mathbf{1}(c_i = c)
$$
其中
参数设置:
- (与训练时相同)
实验分析
参数化 vs 非参数化Softmax
在CIFAR-10上的对比实验:
| 方法 | Linear SVM | k-NN |
|---|---|---|
| 参数化Softmax | 60.3% | 63.0% |
| 非参数化Softmax | 75.4% | 80.8% |
关键发现:
- 非参数化方法显著优于参数化方法(+18%)
- k-NN性能接近线性SVM,说明学习到的特征度量质量高
NCE近似质量
不同负样本数量的影响:
| m | k-NN Accuracy |
|---|---|
| 1 | 42.5% |
| 10 | 63.4% |
| 512 | 78.4% |
| 4096 | 80.4% |
结论:随着增加,NCE近似质量提升,时接近完整softmax。
ImageNet分类结果
不同网络架构的性能:
| 方法 | conv5 (Linear) | k-NN | 特征维度 |
|---|---|---|---|
| Random | 14.1% | 3.5% | 10K |
| Split-Brain | 35.2% | 11.8% | 10K |
| Ours (AlexNet) | 35.6% | 31.3% | 128 |
| Ours (VGG16) | 39.2% | 33.9% | 128 |
| Ours (ResNet-18) | 44.5% | 41.0% | 128 |
| Ours (ResNet-50) | 54.0% | 46.5% | 128 |
关键发现:
- 显著超越SOTA:在ImageNet上大幅超越之前的方法
- 网络深度优势:从AlexNet到ResNet-50,性能持续提升
- 紧凑表示:仅用128维特征就达到优异性能
- 存储高效:1.28M图像的特征仅需600MB存储
特征泛化能力
在Places数据集上的零样本评估(使用ImageNet训练的特征):
| 方法 | ResNet-50 (conv5) | ResNet-50 (k-NN) |
|---|---|---|
| Ours | 45.5% | 41.6% |
结论:学习到的特征具有良好的跨数据集泛化能力。
训练目标与测试目标的一致性
关键观察:
- 训练损失持续下降
- 测试准确率同步提升
- 无过拟合迹象
意义:说明训练目标(实例判别)与测试目标(语义分类)是一致的,学习到的特征确实捕获了视觉相似性。
消融实验
特征维度:
| 维度 | Top-1 Accuracy |
|---|---|
| 32 | 34.0% |
| 64 | 38.8% |
| 128 | 41.0% |
| 256 | 40.1% |
结论:128维是最优选择,性能在128维达到峰值。
训练数据量:
| 数据比例 | Accuracy |
|---|---|
| 0.1% | 3.9% |
| 1% | 10.7% |
| 10% | 23.1% |
| 30% | 31.7% |
| 100% | 41.0% |
结论:性能随训练数据量增加而持续提升,说明方法具有良好的可扩展性。
半监督学习
使用不同比例的标注数据进行微调:
| 标注比例 | Ours (ResNet) | Scratch (ResNet) | Split-Brain (AlexNet) |
|---|---|---|---|
| 1% | 48.0% | 38.0% | 35.0% |
| 2% | 57.0% | 46.0% | 42.0% |
| 4% | 63.0% | 54.0% | 50.0% |
| 10% | 70.0% | 65.0% | 62.0% |
| 20% | 75.0% | 72.0% | 70.0% |
结论:在少样本场景下优势明显,1%标注数据时领先10%。
目标检测
在PASCAL VOC 2007上的检测性能:
| 方法 | AlexNet | VGG16 | ResNet-50 |
|---|---|---|---|
| Supervised | 56.8% | 67.3% | 76.2% |
| Ours | 48.1% | 60.5% | 65.4% |
结论:在检测任务上达到无监督方法的SOTA,且随网络加深性能提升。
代码实现
核心损失函数实现
1 | import torch |
完整训练流程
1 | import torch |
k-NN分类器实现
1 | def knn_classify(query_features, memory_bank, memory_labels, k=200, temperature=0.07): |
技术细节
Memory Bank更新策略
选项1:直接替换
1 | memory_bank[indices] = features |
选项2:动量更新
1 | memory_bank[indices] = momentum * memory_bank[indices] + (1 - momentum) * features |
选项3:仅在训练时更新
- 训练时:每次迭代更新
- 测试时:固定不变
温度参数选择
- 典型值:0.07(与SimCLR、MoCo相同)
- 调优范围:0.05 - 0.15
- 影响:控制softmax分布的尖锐程度
NCE负样本数量
- 最小值:(性能较差)
- 推荐值:(性能接近完整softmax)
- 权衡:越大,性能越好,但计算成本也越高
近端正则化系数
- 典型值:
- 作用:稳定训练,加速收敛
- 调优:根据训练稳定性调整
优缺点分析
优点
- 概念简单:将无监督学习转化为实例分类问题
- 非参数化:特征直接作为"类别原型",泛化能力强
- 存储高效:128维特征,1M图像仅需600MB
- 可扩展性好:性能随数据和网络深度提升
- 训练测试一致:都使用相同的度量空间
缺点
- 计算成本:需要大量负样本(NCE)
- Memory Bank维护:需要存储所有实例的特征
- 更新延迟:Memory Bank更新有延迟,可能影响性能
- 对数据增强依赖:需要合理的数据增强策略
与后续工作的关系
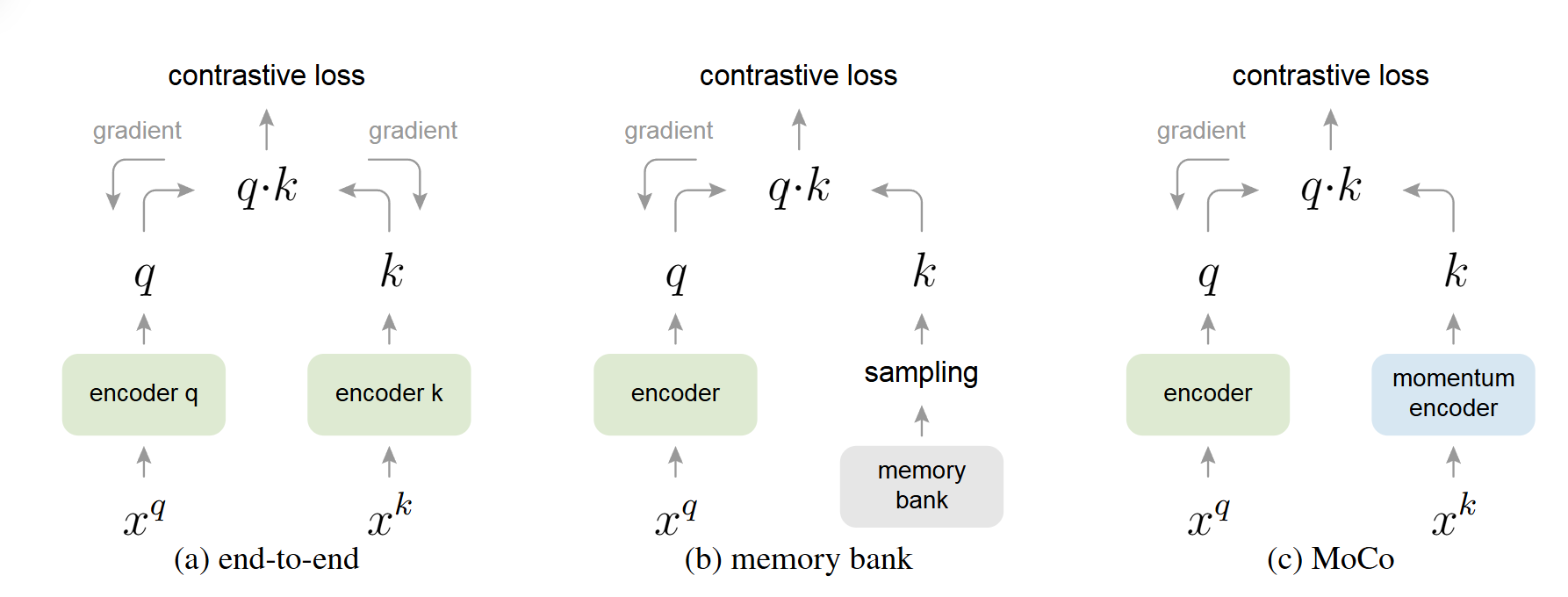
对MoCo的启发
- Memory Bank → 队列:MoCo用队列替代Memory Bank
- 直接更新 → 动量更新:MoCo使用动量编码器
- 一致性保证:两者都关注特征的一致性
对SimCLR的启发
- 实例判别思想:SimCLR也使用实例判别
- 端到端训练:SimCLR去除了Memory Bank,使用大batch
- 数据增强重要性:SimCLR强调了数据增强的关键作用
对SupCon的启发
- 监督信号融入:SupCon将标签信息融入对比学习
- 同类样本作为正样本:SupCon扩展了正样本的定义
总结
实例判别学习通过将每个图像实例视为独立类别,使用非参数softmax和NCE来学习特征表示。其核心贡献包括:
- 非参数化设计:特征直接作为类别原型,泛化能力强
- NCE近似:解决了大规模实例分类的计算问题
- Memory Bank机制:高效存储和更新所有实例的特征
- 近端正则化:稳定训练过程
虽然后续的MoCo、SimCLR等方法在实现上更加优雅,但实例判别学习奠定了对比学习的基础思想,是这一领域的重要里程碑。
参考文献
Wu, Z., Xiong, Y., Yu, S. X., & Lin, D. (2018). Unsupervised feature learning via non-parametric instance discrimination. CVPR 2018. https://arxiv.org/pdf/1805.01978
Gutmann, M., & Hyvärinen, A. (2010). Noise-contrastive estimation: A new estimation principle for unnormalized statistical models. AISTATS 2010.
He, K., et al. (2020). Momentum Contrast for Unsupervised Visual Representation Learning. CVPR 2020.
Chen, T., et al. (2020). A Simple Framework for Contrastive Learning of Visual Representations. ICML 2020.
思考题
- 为什么非参数softmax比参数化softmax更适合实例判别任务?
- NCE如何将多类分类问题转化为二分类问题?为什么这样有效?
- Memory Bank机制的优势和局限性是什么?与MoCo的队列机制有何区别?
- 近端正则化为什么能稳定训练?其背后的数学原理是什么?
- 实例判别学习与后续的MoCo、SimCLR在思想上有何联系和区别?
- 为什么k-NN分类器在测试时表现良好?这说明了什么?
思考题答案
1. 为什么非参数softmax比参数化softmax更适合实例判别任务?
参数化softmax的问题:
- 泛化能力弱:权重向量只对训练实例有效,无法应用到新实例
- 阻止直接比较:权重向量作为"类别原型",阻止了实例特征间的直接比较
- 参数冗余:需要为每个实例存储一个权重向量,参数量大
非参数softmax的优势:
- 直接比较实例:特征向量直接作为"类别原型",允许实例间的直接比较
- 泛化能力强:学习到的特征可以应用到任何新实例
- 参数高效:无需存储权重参数,只需存储特征
- 训练测试一致:训练和测试都使用相同的特征度量空间
实验验证:在CIFAR-10上,非参数方法比参数方法性能提升18%,证明了其优势。
2. NCE如何将多类分类问题转化为二分类问题?为什么这样有效?
转化过程:
- 原始问题:区分个类别(实例),需要计算所有类别的概率
- NCE转化:将问题转化为"区分数据样本和噪声样本"的二分类问题
- 后验概率:
$$
h(i, v) = \frac{P_d(i\mid v)}{P_d(i\mid v) + m \cdot P_n(i)}
$$
其中是数据分布,是噪声分布(均匀分布)
为什么有效:
- 计算效率:从降低到每个样本
- 近似质量:当负样本数量足够大时,近似质量接近完整softmax
- 理论基础:NCE有坚实的理论保证,是unnormalized模型的标准估计方法
- 实践验证:实验表明时性能接近完整softmax
关键洞察:不需要计算所有类别的概率,只需要区分"是正样本"还是"是噪声样本"。
3. Memory Bank机制的优势和局限性是什么?与MoCo的队列机制有何区别?
Memory Bank的优势:
- 存储所有特征:可以访问训练集中所有实例的特征
- 计算高效:避免每次重新计算所有特征
- 历史信息:保留特征的历史状态
Memory Bank的局限性:
- 更新延迟:特征更新有延迟(使用上一迭代的特征)
- 内存需求:需要存储所有实例的特征
- 一致性挑战:特征可能因为编码器变化而变得不一致
与MoCo队列的区别:
| 特性 | Memory Bank | MoCo队列 |
|---|---|---|
| 大小 | 所有训练实例 | 固定大小(如65536) |
| 更新 | 直接替换 | FIFO(先进先出) |
| 一致性 | 可能不一致 | 通过动量编码器保证 |
| 存储 | 所有实例 | 仅最近batch的特征 |
MoCo的改进:
- 使用动量编码器保证Key的一致性
- 队列大小固定,内存可控
- FIFO更新保证队列中的特征相对新鲜
4. 近端正则化为什么能稳定训练?其背后的数学原理是什么?
问题背景:
- 每个"类别"只有一个实例
- 每个epoch每个类别只访问一次
- 随机采样导致训练过程振荡严重
近端正则化的作用:
- 平滑性约束:鼓励当前特征与上一迭代特征接近
- 减少振荡:防止特征因为随机采样而剧烈变化
- 稳定梯度:使梯度更新更加平滑
数学原理:
近端正则化项:
这等价于在优化问题中加入平滑性约束:
- 当:退化为原始损失
- 当:强制(不更新)
优化视角:
近端正则化是近端梯度方法的应用,用于优化非光滑或约束优化问题。在这里,它起到了稳定化的作用。
实验验证:图3显示,加入正则化后训练损失曲线更平滑,收敛更快。
5. 实例判别学习与后续的MoCo、SimCLR在思想上有何联系和区别?
共同思想:
- 实例判别:都将每个实例视为独立类别
- 对比学习:通过区分正负样本来学习特征
- 特征归一化:都使用L2归一化
- 温度参数:都使用温度缩放
主要区别:
| 特性 | Instance Discrimination | MoCo | SimCLR |
|---|---|---|---|
| 负样本来源 | Memory Bank | 队列 | 当前batch |
| 特征更新 | 延迟更新 | 动量更新 | 实时更新 |
| 计算方式 | NCE近似 | 完整softmax | 完整softmax |
| batch size | 小(256) | 中等(1024) | 大(≥4096) |
| 实现复杂度 | 中等 | 较高 | 较低 |
演进关系:
- Instance Discrimination:提出非参数softmax和Memory Bank
- MoCo:改进Memory Bank为队列,引入动量编码器
- SimCLR:去除Memory Bank,使用大batch和端到端训练
核心改进:
- MoCo解决了Memory Bank的一致性问题
- SimCLR简化了实现,但需要更多计算资源
6. 为什么k-NN分类器在测试时表现良好?这说明了什么?
k-NN表现良好的原因:
- 训练测试一致:训练和测试都使用相同的特征度量空间
- 非参数化设计:特征直接作为"类别原型",适合k-NN
- 度量质量高:学习到的特征确实捕获了视觉相似性
实验证据:
- 在ImageNet上,k-NN准确率(46.5%)接近线性SVM(54.0%)
- 说明学习到的特征度量质量很高
深层含义:
- 训练目标有效:实例判别目标与语义分类目标一致
- 特征质量高:特征空间中的距离确实反映了视觉相似性
- 泛化能力强:学习到的表示可以泛化到新任务
对比其他方法:
- Split-Brain:k-NN准确率(11.8%)远低于线性SVM(35.2%)
- 说明其学习到的特征度量质量较低
结论:k-NN的良好表现证明了实例判别学习的有效性,学习到的特征确实捕获了视觉相似性,而不仅仅是适合特定分类器的表示。
深入理解与实践思考
- 实例判别与语义判别的关系:虽然每个实例都被视作一个类别,但模型最终学习到的特征仍然会聚合出语义簇。这一现象说明视觉数据的结构性远强于我们赋予的标签结构。实际操作中可以通过t-SNE/UMAP观察到同类样本自然聚团。
- Memory Bank vs. 队列:Memory Bank提供了全局视角,但需要处理“陈旧”特征的问题。后来MoCo中的动量编码器与固定长度队列,可以被视作对“特征一致性”与“可扩展性”的不同取舍。若业务中GPU显存紧张,可采用分片Memory Bank或结合近邻图的稀疏更新。
- 正则化的更广义含义:近端正则化不仅平滑了优化,还暗含“特征轨迹不能跳跃太远”的约束,相当于引入了一个时间维度的Lipschitz限制。这提醒我们,在设计自监督任务时,需要关注优化轨迹是否稳定。
- 评价指标的选择:k-NN性能高说明学到的度量空间质量好,但在工业场景往往还需关注召回、延迟等指标。实例判别学习天然适合构建向量检索服务(如图像去重、相似商品推荐)。
- 与现代方法的衔接:若希望复现最新SOTA,可在此框架上引入更强的编码器(ViT、ConvNeXt)、更丰富的数据增强(RandAugment、CutMix)以及更加稳定的优化器(AdamW + Cosine)。同时也可以尝试将SupCon的标签约束融入Memory Bank以获得更平滑的语义结构。
开放问题与研究方向
- Memory更新策略:能否利用动量更新与自适应权重结合,既保持全局视野又不过度依赖旧特征?
- 负样本质量:如何更智能地采样“困难负样本”,避免CNN在易区分的负样本上浪费容量?
- 多模态扩展:能否直接在该框架中支持图像-文本或多模态实例判别,减少对比学习与跨模态模型之间的割裂?
- 理论解释:实例判别为何能自动恢复语义结构?是否存在可证明的聚类或流形假设支撑?
- 增量学习:面对不断新增的数据集,如何无缝扩展Memory Bank并避免遗忘?
 微信
微信