Agentic RL:从 PG 到 TRPO 到 PPO-Clip(推导与代码对齐)
这篇文章面向“RL 基础薄弱但想快速读懂 PPO/Agentic RL 训练代码”的读者,目标是把下面三件事讲清楚,并且和你能跑起来的代码一一对应:
- PG loss 到底是什么:它不是“监督学习意义上的 loss”,而是为了拿到正确梯度构造的 surrogate(代理目标)。
- TRPO 想解决什么:为什么要用 KL trust region 限制策略更新幅度。
- PPO-clip 为什么长这样:clip 不是拍脑袋,而是在做一个“好实现”的 trust region 近似。
系列导航:
配套资料来自 B 站视频与仓库(建议你边看边对照):
- 视频 02:
[Agentic RL] 02 策略梯度基础,从 PG 到 TRPO 到 PPO-Clip 核心公式简单推导 - 视频 03:
[Agentic RL] 03 策略梯度补充,GRPO loss 分析,优势标准化,On Policy - 代码/笔记仓库:
- GitHub:wdkns/modern_genai_bilibili
- 核心 notebook:
agentic_rl/deep_RL/pg/from_pg_to_ppo-clip.ipynb(视频 02:推导主线)agentic_rl/deep_RL/pg/policy_gradient.ipynb(视频 03:GRPO loss / 优势标准化 / On-policy + PPO case study)
- 一个“玩具 LLM-RL 对齐”脚本(REINFORCE + KL penalty):
agentic_rl/deep_RL/scripts/reinforce_align.py
如果你更关心 PPO 训练工程里的 Dual-clip / Entropy / KL / Loss 聚合,建议先读我上一篇(组件解析更偏工程视角):
如果你希望把“推导”快速落到“训练调参/日志诊断”,建议你也顺带读:
0. 先校正一个直觉:PG loss 不是“性能指标”,reward curve 才更像
监督学习里,你最小化的是一个“固定数据分布上的静态目标”。
而 RL(尤其 on-policy 的 PPO/GRPO)里,你每一轮采样的数据分布都在变:
- 第次更新,用的是由采样得到的数据分布;
- 第次更新,用的是采样得到的;
所以你日志里的 policy_loss 横向并不总可比,它更像“当前这一步的更新信号强弱”,而不是“模型变好了多少”。
在 LLM-RL / Agentic RL 里更是如此:你真正关心的通常是任务指标(成功率、RM reward、事实一致性、引用覆盖、成本等),它们才是你要看的 reward curve。
0.1 为什么 RL 的 loss curve 常常“越训越大/不单调”
在很多 LLM-RL/GRPO/PPO 的实现里,你看到的目标大致可以写成“策略项 + KL 正则”的形式(这里用 PPO-clip 举例):
关键点是:第轮和第轮的期望分布、不是同一个,因为它们来自不同的策略采样。所以你画出来的 “loss curve” 很可能是在比较 “apple/orange/potato”,横向可比性天然很差。
更可操作的结论:
- reward curve/任务指标优先于 loss curve。
- loss 组件里更值得看的通常是:
KL、clip fraction、entropy、adv/std等“稳定性指标”。
0.2 这篇文章的“工程结论”清单(不看推导也能用)
如果你读完这篇只记住几条“能用来调参/读日志”的结论,我希望是这些:
- PG/PPO 的 policy loss 是 surrogate,不是性能指标:跨 iteration 横向比较往往没意义,优先看 reward/成功率/任务指标。
- PPO 的关键中间量就是 ratio:
r = exp(logp_new - logp_old)。一旦你做多 epoch 更新或复用数据,它就会从 1 开始漂移。 - PPO-clip 的目的不是“让 loss 变小”:而是让“有利方向的过度更新”被截平,避免一步跨太大导致崩。
- TRPO/PPO 的约束本质是“更新别太猛”:工程上你通常用
approx_kl / clip_fraction / entropy这种可观测量去闭环,而不是盯着一个理论上的。 - 在 LLM-RL 里,聚合方式改变数值尺度:token-level vs seq-level,
sumvsmean,会直接改变“你以为的学习率/系数大小”。先把聚合讲清楚再谈超参区间。 - 多 epoch = 轻度 off-policy:PPO 常被叫 on-policy,但“rollout 很贵所以复用数据”会把你推向 off-policy drift;它不是原罪,但必须用 KL/clipfrac 监控。
(如果你想要一个“看到某个现象该动哪个旋钮”的表格版诊断,直接看 veRL 那篇的 调参诊断表。)
1. 我们到底在优化什么:轨迹期望回报
在策略梯度(Policy Gradient)视角下,我们用参数的策略与环境交互,产生轨迹(trajectory):
典型的目标是最大化期望折扣回报:
注意:的分布是由决定的,这意味着你不是在对一个固定数据集做最优化,而是在对“会随着参数变化的采样分布”做最优化。
2. 为什么会出现 log π:log-trick(score function estimator)
你想对求梯度,困难在于:期望是对一个依赖的分布取的。
关键技巧是:
把换成轨迹,并利用“环境转移不依赖(只依赖策略)”,可以推到经典的 REINFORCE / PG 形式:
其中是 return-to-go:
这回答了你问的:
- PG loss 里的
log π从哪里来的?
它来自对分布求导时必须使用的 log-trick,否则你很难用采样/蒙特卡洛得到无偏梯度估计。
3. Advantage(baseline):为什么从变成
REINFORCE 的梯度估计方差很大。一个经典做法是减去 baseline,不改变期望梯度,但显著降低方差:
直觉上,优势函数把“绝对分数”变成“相对平均水平的超额收益”:
- :这步动作比平均水平好,应该提高它出现的概率;
- :这步动作比平均水平差,应该降低它出现的概率。
在实现里,常见 baseline 就是 value function(Actor-Critic 体系),于是:
3.1 折扣回报与 baseline 的直觉
折扣(discount)回答的是:离奖励越远的动作,对最终回报“负责得越少”。
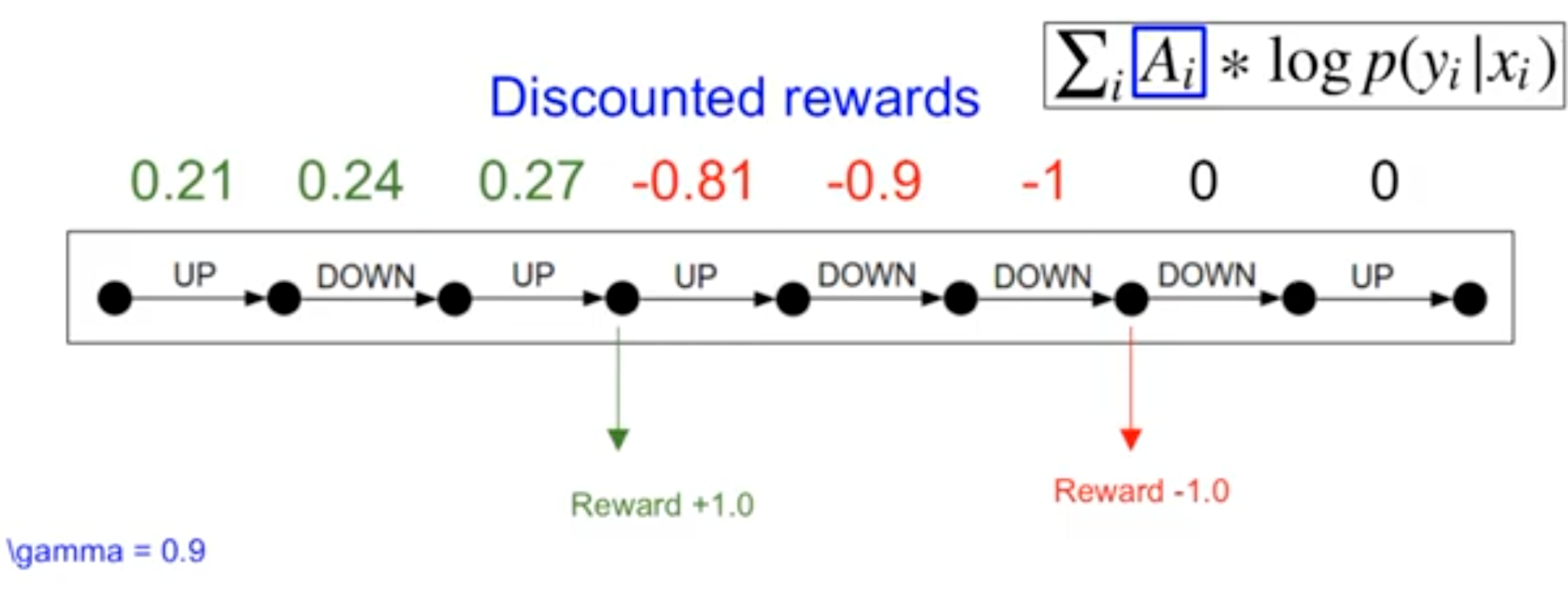
baseline 的直觉则是:把“绝对分数”变成“相对平均水平的超额收益”。哪怕你一直在输(return 是负数),也可能出现“比平均水平输得少”的一局,这局的 advantage 仍然是正的,策略依然应该提高那局里动作的概率。
4. PG loss 是什么:为了自动微分构造的 surrogate loss
深度学习框架默认做的是“最小化 loss”,所以我们把“最大化”改写成一个等价梯度方向的 surrogate loss:
实现里你要记住一句话:
- 采样出来的当常数(stop-grad),让梯度只通过回传。
这也是为什么很多框架会对 advantages / old_logprobs 做 detach()。
4.1 PG vs Supervised Learning:为什么 PG loss 看起来像“加权交叉熵”
一个非常好用的对比(来自 Karpathy 的 RL 笔记):
- 监督学习(交叉熵)最大化对数似然:
- 是固定的 ground-truth label,数据集是静态的。
- 策略梯度(PG)最大化“带权重的对数似然”:
- 但这里没有 label,是你从当前策略里采样出来的 action(token/动作),是 credit assignment(优势/回报信号)。
所以你可以把 PG loss 视作一种“自采样数据上的加权 MLE”,权重就是 advantage。
5. 为什么 PPO 公式里看起来“没有 log”:重要性采样 ratio 来了
现实训练里,采样很贵。你通常会:
- 用旧策略rollout 一批数据(轨迹/response);
- 在同一批数据上做多次更新(多 epoch)。
这意味着你在优化新策略时,数据分布却来自。于是引入 重要性采样比率:
于是 CPI/TRPO 常写的 surrogate objective 是:
5.1 LLM-RL 的一个实现关键:token-level ratio 与 seq-level ratio
在 LLM-RL 里,是 token,是“prompt + 已生成前缀”。因此 ratio 默认是 token-level:
如果你试图构造“整段输出”的序列级 ratio,那么它会变成连乘(对数空间是累加):
序列级 ratio 在长序列上数值会非常极端(爆炸/下溢),也会让优化目标对“长度”异常敏感。所以你会看到大多数工程实现(verl/openrlhf/trl 等)更倾向于:
- 用 token-level ratio 做 surrogate;
- 再用某种聚合(token mean / seq mean / group mean)把它变成一个标量 loss。
这也是为什么我一直强调:你看到的每一个 loss/KL/entropy 数值,都必须问清楚它是在哪个维度聚合出来的。
一个很关键的结论(也是“从 PG 到 TRPO 到 PPO”的桥):
在附近,的一阶梯度方向与 vanilla PG 一致。
这也解释了“PPO 公式为什么看起来没有 log”:
- 你在公式里看到的是;
- 但代码里你仍然在算
r = exp(logp_new - logp_old); log并没有消失,只是被你藏进 ratio 的计算里了。
6. TRPO:用 KL trust region 明确约束“更新别太猛”
仅最大化仍可能出现“策略一步跨太大导致性能崩”的问题。TRPO 的做法是加一个 trust region 约束:
直觉:在“以旧策略为中心”的 KL 球里找一个最好的更新。
难点:这个约束优化更接近二阶优化(共轭梯度等),不太容易直接放进你熟悉的 mini-batch SGD 训练循环里。
6.1 方向别搞错:训练里你监控的 KL 往往不是你写在论文里的 KL
TRPO 的约束形式写成还是,在理论推导里可以通过近似互相转换(小步近似下它们都接近同一个二次型)。但在工程里你通常监控的是一种 采样估计,它的方向往往是:
它和 full-distribution 的 KL 不等价,只是“足够便宜且能反映漂移幅度”的 proxy。你做调参时的要点不是“哪一个更正确”,而是:
- 明确你日志里打印的 KL 估计到底是哪一种;
- 用同一种定义做横向对比和阈值判断;
- 结合
clip_fraction/entropy/reward一起看,别只盯 KL。
7. PPO-clip:用 clip 做一个“好实现”的 TRPO 近似
PPO-clip 用一个工程上非常好实现的方式近似 trust region:
你可以把它理解成:
- 代表新旧策略概率变化倍率;
- clip 把倍率限制在;
min让目标函数在“过度乐观”的那一侧被截平,从而更稳。
7.1 最重要的 case-by-case 结论(建议背下来)
- (好动作)
- 若:上涨太猛,会被 clip 截平(梯度被压住)。
- (坏动作)
- 若:下降太猛,会被 clip 截平(梯度被压住)。
一句话总结:
- PPO-clip 主要限制“朝着对优势有利的方向”更新过头。
7.2 PPO-clip 的本质取舍:引入偏差换稳定性(不是免费的午餐)
clip 的效果可以理解成一个经典的 bias-variance tradeoff:
- 不 clip:目标更接近“真实的”重要性采样形式,但 ratio 一旦变大,方差会爆,训练很容易崩。
- clip:对“过大更新”的样本把目标截平,显著降低方差与训练崩溃概率,但代价是引入偏差(你不再严格优化原目标)。
所以你在日志里看到 clip_fraction 很高时,不要只想着“更稳了”,而要问:
- 是不是我更新太激进(LR/epoch/batch/adv scale)导致大量样本触发剪裁,学习实际上被卡住?
- 是不是 reward 设计在诱导策略做极端动作,从而把 ratio 推爆?
这也是为什么 PPO 的“好用”来自一个非常工程化的前提:你得把更新幅度控制在一个合理范围里,让 clip 只在“救命”时生效,而不是常态。
8. PPO loss 为什么经常在 0 附近震荡:一个极简 case study
policy_gradient.ipynb 里用一个很实用的 toy 函数把 PPO-clip 的 per-sample 项拆开看:
1 | import numpy as np |
它帮你快速建立这样一个判断:
- 当“正优势样本多对应到、负优势样本多对应到、且很少触发不利剪裁分支”时,往往偏正(最小化形式就是偏负)。
- 反过来,当正优势样本概率被压低、负优势样本概率大涨且被按更差的一边记账时,目标会偏负。
如果你把 advantage 做了零均值/标准化,那么在纯 on-policy()时 ratios 都是 1,PPO 的 PG 项也会很自然地在 0 附近摆动,这并不奇怪。
8.1 优势标准化(whiten)会让 loss 更“接近 0”,但不等于没有梯度
实践里经常会对 advantage 做标准化(whiten):
当时,的数值可以写成协方差形式:
这带来一个很重要的观测口径:
- loss 的正/负,更多反映的是“策略是否更偏好优势动作”的相关性,而不是“任务好坏的绝对标尺”。
- 看到 loss 接近 0,并不能推出
grad=0或“没学到”,更常见的是“尺度被重新定标/中心化了”。
9.(视频 03)GRPO loss 怎么看:为什么 loss=0 不等于 grad=0
GRPO/Group-based 方法的核心训练形态是:每个 prompt 采样一组(group)输出,用组内相对分数构造 advantage(常见是中心化/标准化),再做一个 PPO-clip 风格的 surrogate + KL anchor。
一种常见的写法是:
其中就是 token-level ratio:。
为什么经常会看到 “loss≈0”?
- 如果你把奖励/优势做了组内中心化(mean=0),那么策略项在“数值均值”意义上很容易接近 0;
- 但梯度取决于相关性(协方差项),并不等价于 0。
所以看 GRPO 训练日志时,更稳的做法是把 policy_loss 当作“当前更新信号的一种投影”,而把 reward/成功率 + KL/clip/entropy 等稳定性指标当作主监控项。
10. 最小可复现代码:CartPole 的 REINFORCE(对应 notebook)
下面这个实现来自 policy_gradient.ipynb 的核心代码(做了轻微排版),它能帮助你把“公式里的每一项”对应到代码里的每一步:
1 | import gymnasium as gym |
读这段代码时,你可以逐行对照公式:
saved_log_probs就是;returns(标准化后)扮演了的角色;loss = -log_prob * A就是 policy gradient surrogate loss。
11. 从 CartPole 到 LLM-RL:一个 REINFORCE + KL penalty 的玩具对齐脚本
仓库里有个非常直观的脚本:deep_RL/scripts/reinforce_align.py。
它做的事情可以一句话概括:
- 用语言模型采样一段文本(相当于 rollout)
- 用某个 reward function 给这段文本打分
- 用 REINFORCE 形式更新模型,并加一个 对 reference model 的 KL 正则 防止漂移
代码结构上最关键的两行就是:
这也能帮助你理解为什么 LLM-RL 训练里会出现:
- policy(PG)项
- KL 项
- 以及“为什么看起来 loss 在每轮都变了”
注意:这是 toy demo,目的不是追求工程最优,而是帮助你建立“公式-代码”映射。
12. 下一步读什么:把推导接到 Agentic RL / GRPO / verl 工程
如果你是奔着 Agentic RL(比如 deep research agent)来的,我建议你按这个顺序继续看仓库:
- 代理目标与 on-policy/off-policy:
agentic_rl/deep_RL/objective_代理loss.ipynb - PPO 从零实现(建立直觉,不一定真训练):
agentic_rl/deep_RL/ppo/ppo_from_scratch.ipynb - verl 的 objective 与 loss 聚合(你上一篇 PG loss 组件文章也讲了很多):
agentic_rl/verl/objectives/objectives_loss.ipynb、agentic_rl/verl/objectives/agg_loss.ipynb - 任务侧(deep research / search agent):
agentic_rl/tasks/deepresearch.ipynb、agentic_rl/tasks/search-agent.ipynb
最后提醒一句:做 agentic RL 不一定先从“微调 LLM”开始。很多深研究任务更有效的路径是:
- 先把评测闭环(reward/metrics)做扎实;
- 再决定训练的是“LLM 本体”还是“agent 决策层”(工具调用/检索/规划策略)。
 微信
微信
